驭模有道,智胜未来:大模型助力智能化变革

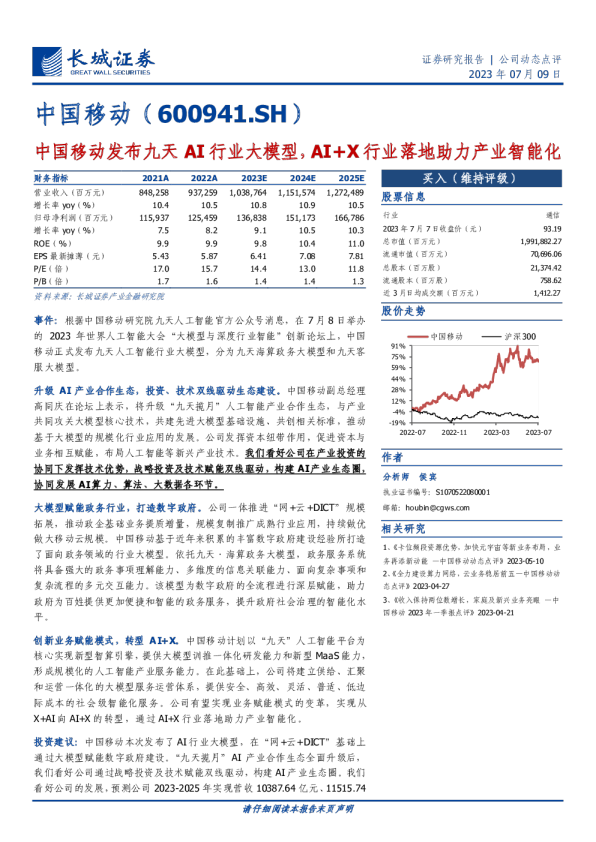
驭模有道智胜未来 Guidethemodelwithwisdomsurpassingthefuture 大模型助力智能化变革 Foundationmodelfacilitatetheintelligenttransformation 陈勇博士 Dr.YongChen 吉利汽车GEELYAUTO 基于用户体验驱动技术价值创造,使智能化设计回归理性 Createtechnologicalvaluedrivenbyuserexperience,bringingintelligentdesignbacktorationality. 由粗犷的硬件驱动体验转向数据算法驱动体验 Shiftingfromarawhardware-drivenexperiencetoadataalgorithm-drivenexperience. ComputationalPower High 30T100-200T200-500T500-800T1000T+ 技术驱动创新 Technology- driveninnovation 系统集成化 Systemintegration AI算法迭代 AIalgorithmiteration 数据闭环 DataClosureLoop 大模型 Foundationmodel …… 1000+TOPS 轻地图 Reducehigh-precision 去硬件 Hardwarereduction 5R13V+3L maps 5R12V+2L 5R11V+1L/3L Middle 5R10V ODDincrease BEV 5R9V Beginner 5R5V 3R1V More… E2E 1R1V 大模型发展核心四要素:3+1 Thefourcoreelementsofthedevelopmentoffoundationmodels:3+1 人工智能时代:涌现式+继承式 ArtificialIntelligenceEra:Emergent+Inherited 数据 Data 算力 ComputationalPower 算法 Algorithm 先验知识 PreviousKnowledge 大数据平台 BigDataPlatform 星睿智算中心 XingruiIntelligenceComputingCenter LLM/MultimodalModel AI-DRIVE智能驾驶大模型 AI-DRIVEIntelligentDrivingFoundationModel 汽车行业的知识积累 KnowledgeAccumulationintheAutomotiveIndustry 大模型助力智能化变革 Foundationmodelsboosttheintelligenttransformation 丰富的生成内容 RichGenerativeContent 全新的交互体验 Completelynewinteractiveexperience 先进的生产力工具 Advancedproductivitytools 新的开发范式 Newdevelopmentparadigm 大语言模型LLM 多模态模型MultimodalModel GUI+MUI VUI+NUI 代码生成CodeGeneration 摘要生成/知识问答Abstractgeneration/KnowledgeQ&A +LM LM+ 百模大战 BattleofaHundredMolds 用户场景决定技术价值 Userscenariosdeterminethevalueoftechnology Weallneedfoundationmodels Doweallneedfoundationmodels? 新技术是来解决问题的或创造价值增量的 Newtechnologiesaredevelopedtosolveproblemsortocreate incrementalvalue. 产品需要有市场和价值定位 Theproductneedstohaveamarketandvaluepositioning 智能驾驶大模型应用 Applicationsofthefoundationmodelonautonomousdriving 智能驾驶核心要素 KeyElementsofIntelligentDriving 安全:安全≠安全感 Safety:Safety≠SenseofSafety 体验:有没有≠好不好 Experience:Presence≠Quality 成本:去冗余≠去体验 Cost:Redundancy≠Experience 智能驾驶长尾效应带来的安全困境 SafetyDilemmaCausedbytheLongTailEffectofIntelligentDriving. 感知大多数还停留在标注阶段,缺少认识能力 Mostperceptionremainsintheannotationstage,lackingcognitiveability. 在复杂道路和拥堵的交通流条件下,接管率高 Hightakeoverrateincomplexroadandcongestedtrafficconditions. 智能驾驶体验未实现全驾驶场景覆盖,体验不连贯 Incompletecoverageofdrivingscenariosinintelligentdrivingexperience,leadingtoinconsistentexperiences. 大量冗余传感器及技术,系统成本居高不下 Highsystemcostsduetoredundantsensorsandtechnologies. 大规模的数据采集标注、软硬件设计开发 Large-scaledatacollection,annotation,software,andhardwaredesignanddevelopment. 数据驱动模型迭代和体验升级 Data-drivenmodeliterationandexperienceenhancement 智能驾驶大模型应用 Applicationsofthefoundationmodelonautonomousdriving 解决关键核心问题并创造价值 AddressingKeyCoreIssuesandCreatingValue 数据量不足 Insufficientdatavolume 数据采集、标注成本高 Highcostsofdatacollectionandannotation 局部优化、无认识博弈 Localoptimization,nocognitivegame 数据合成技术 Datasynthesistechnology AIGC风格迁移 AIGCstyletransfer 虚拟资产开发 Virtualassetdevelopment 语义分割Semanticsegmentation 同类聚合Similarityaggregation 视频理解 Videounderstanding FreeSpace 数据标签 Datalabeling 自动标注Automatic annotation E2E大模型技术 E2Efoundationmodeltechnology 多感知融合技术(车内外) Multi-perceptionfusiontechnology(insideand outsidethevehicle) 解决安全性和可解释性等问 Addressingissuessuchassafetyandinterpretability 智能驾驶大模型应用 Applicationsofthefoundationmodelonautonomousdriving 大模型赋能数据合成技术:两手都要抓[质+量] EmpoweringDataSynthesisTechnologywithFoundationModel:GraspingBothQualityandQuantity 感知行车场景Perceptionofdrivingscenarios 泊车·场景Parkingscenes 智能驾驶CornerCaseIntelligentdrivingCornerCase 智能驾驶大模型应用 Applicationsofthefoundationmodelonautonomousdriving 将数字孪生技术应用在自动驾驶研发测试上,在虚拟空间中建立物理世界模型,还原真实世界道路场景、交通流,构建元宇宙智驾仿真技术平台,应用车辆动力学建模和物理级传感器建模关键技术和自动标注功能模块,高效合成标注数据,实现自动驾驶算法数据训练,让数据驱动更安全的自动驾驶。 Applyingdigitaltwintechnologytoautonomousdrivingresearchandtesting,establishingphysicalworldmodelsinvirtualspace,reconstructingreal-worldroadscenes andtrafficflow,buildingameta-universeintelligentdrivingsimulationtechnologyplatform,andapplyingkeytechnologiessuchasvehicledynamicsmodelingandphysical-levelsensormodelingandautomaticlabelingfunctionmodules,efficientlysynthesizingannotateddata,achievingdata-drivensaferautonomousdriving. 场景建设 SceneConstruction 数字孪生 DigitalTwin 3D场景 场景重建 SceneReconstruction 3Dscenes 合作伙伴 Partnerships 高精地图 Sim2Real图像数据 Sim2Realimagedata High-precisionmaps Staticscenes 静态 场 仿真内核 数据合成内核 Datasynthesiskernel Simulationkernel 标注数据Annotateddata 仿真控制内核Simulationcontrolkernel 物理传感器模型 合成数据集 Syntheticdataset 标注数据集 Annotateddataset Physicalsensormodel 仿真数据协议层Simulationdataprotocollayer 非标注真值数据 Unlabeledgroundtruthdata 平台功能 PlatformFunctionality 视觉图像AIGC风格迁移VisualimageAIGCstyletransfer 物理传感器(视觉)Physicalsensors(vision) 交通信号控制 Trafficsignalcontrol 景 Sim2Real AI交通流 AItrafficflow LLM/GAIL/SUMO 环境控制 Environmentcontrol Dynamicscenes 路采数据转换 Roaddataconversion 路采数据驱动 Roadsidedata-driven 标准法规案例场景 Standardregulatory scenariocases 第三方标准库 Third-partystandardlibrary 动态场景 物理传感器 (GPS、IMU、Lidar、Radar) Physicalsensors 引擎渲染技术Enginerenderingtechnology 标注功能模块Annotationfunctionmodule 车辆动力学 Vehicledynamics 激光点云数